
日期:2022-11-15 21:41:15
来源:中国汽车趋势网
11月5日,广东潮州饶平县,一辆特斯拉在路边缓缓停靠时,却突然转向马路,随后开启了长达2.6公里的高速狂飙。据闻,该车此次“失控”最高时速达198km/h,最终导致2死3伤。

事故疑点重重,车主做了回应:驾驶员精神状况正常无醉驾、毒驾,且是20年经验的职业货车司机。事故失控的原因是“刹车踏板踩下去很硬,从而无法停车”,这点与之前特斯拉发生的事件很相似。其次是车速越来越快,疑似加速失灵或智能驾驶失灵。
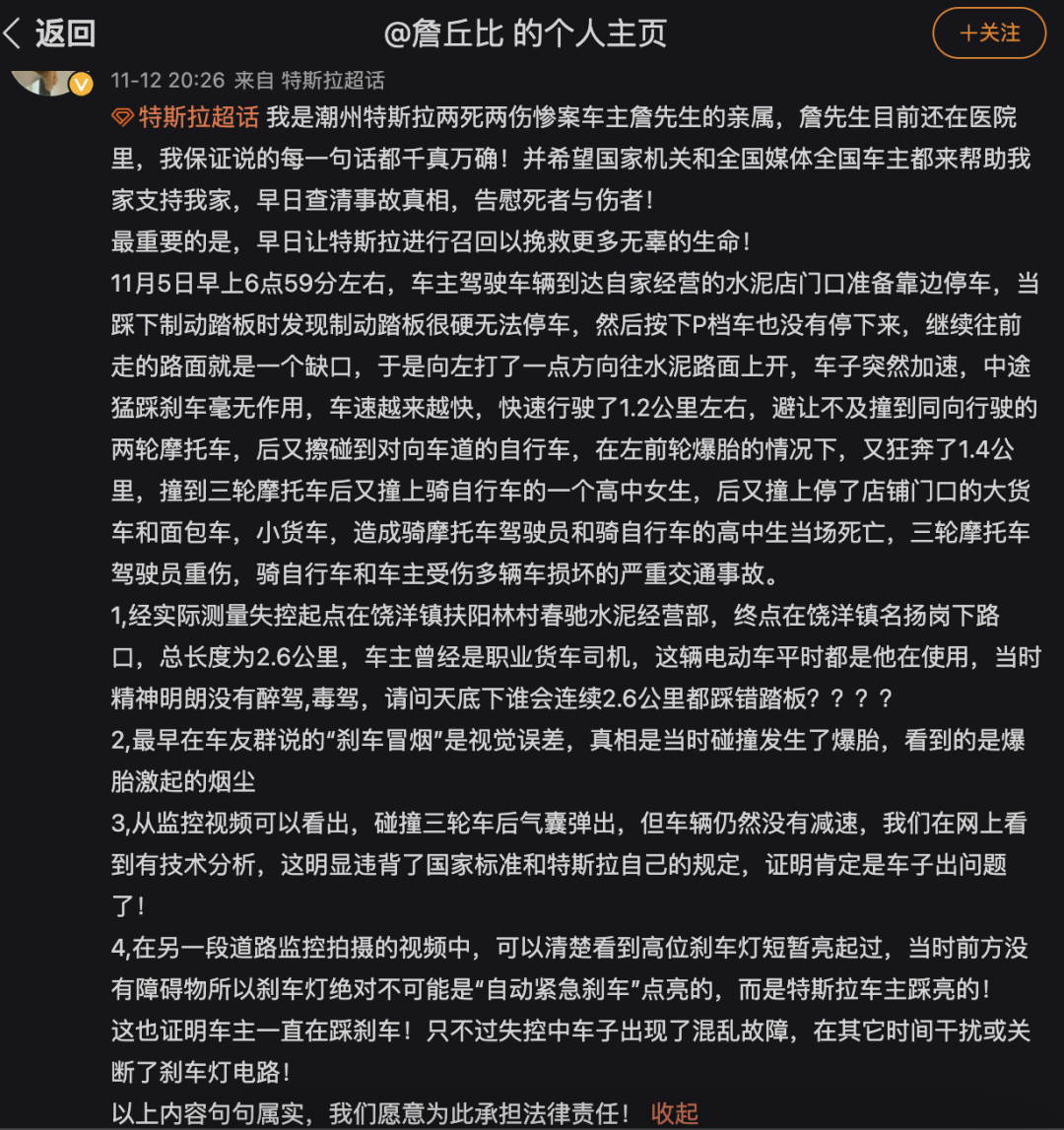
而特斯拉也“疑似”做了回应,与之前的“刹车门”事故同样大同小异:根据后台数据显示,驾驶员只踩了电门,没踩刹车,操作有问题。

不少业内人士对这次事故发表了看法,都觉得人为飙车的几率不大,车辆失控的概率极大,理由归结如下:
1,一个有经验的老司机,长时间都不踩刹车,这很反常;
2,一开始减速停车时,高位刹车灯没亮(一般单踏板模式或刹车都会亮起);
3,车辆行驶过程中,驾驶员一直在规避行人与障碍物,说明有意识且驾驶技术不错;
4,视频中短暂几次高位刹车灯亮了,其中有两段高位刹车灯是持续亮。驾驶员有刹车的行为,但车辆速度依然很快。
当然,此事件在此先不做太多评论,待调查结果出来自会分晓。不过特斯拉相关的智驾引发的问题已不是新鲜事,网上讨论度较高的包括前段时间备受关注的“温州刹车失灵事件”以及此前上海车展特斯拉展台上张女士车顶维权事件。
引发网友的巨大关注,主要还是与自身利益息息相关。特斯拉作为智能汽车的翘楚代表,如果它的智能驾驶都不安全,那怎样的才算安全?
安全是智能驾驶的前提,但靠的是什么?
智能驾驶引发的各种事故,让用户对这项原本能极大改善驾驶体验的功能“敢装不敢用”。尤其是以特斯拉为代表的车企在多次智驾风波后,更是让人们群众对这项功能的安全性不太信任。但其实我们从多个特斯拉事故的分析来看,大概就知道问题出在哪。
比如在2016年,第一起因为使用特斯拉Autopilot系统而发生的死亡车祸。事发的原因是因为前方白色的挂车车身在强烈的日光下并未被Model S的摄像头识别。同样的案例发生在去年3月,一辆特斯拉Model Y在美国底特律市郊撞上了一辆半挂卡车,原因是自动驾驶系统错误地把卡车的白色货厢识别成了天空。
再比如去年4月份晚23时30分左右在美国德克萨斯州的公路上,一辆Model S在车道上急速行驶,随后撞树并起火,造成车内两人死亡。当地警方称,“从现场物证和当晚(发现)尸体的位置和撞击的轨迹,他们百分之百确定撞车时驾驶座上没有人在驾驶汽车”。既然驾驶座没人,那么可以猜测车主通过某些手段开启了自动驾驶,而出现事故的原因,很大可能是因为深夜可见度不高,感知系统没有准确识别道路信息。

以上案例可以看出,智能驾驶不安全的原因是感知系统识别不准确或难以识别。当下汽车行业中采用的感知方案,大体分为以摄像头为主的“纯视觉”感知方案,以及“摄像头+毫米波雷达”为主的多融合感知方案。
特斯拉就是“纯视觉”感知路线的拥趸,他们甚至觉得,现在流行的雷达方案是极为愚蠢的,还觉得任何使用激光雷达方案的最后都会失败。当年他们之所以这么说,多数人猜测主要是因为一颗激光雷达的成本非常高,甚至超过3000美元,这对于销量庞大的特斯拉而言,无疑是笔巨大的成本。
当下特斯拉常见的视觉感知方案,由8颗摄像头组成,通过不同摄像头对焦的角度,来计算车辆与障碍物的距离。但我们都知道,视觉是很容易被环境所欺骗的,尤其是遇到黑夜光线不足、暴雨沙尘天气可见度不高等情况下,别说200米的距离了,看清5米内的都费劲。即便摄像头布局再多,也很难在恶劣天气中获得准确的影像识别。
视觉感知方案在地广人稀的国外或许还有用,但在国内更为复杂的道路环境中,形状不一的障碍物、突然出现的“鬼探头”等,纯视觉就很难做到完整覆盖。
因此现阶段很多车企都更愿意采用的多融合感知方案,摄像头、毫米波雷达能够形成较好的互补作用,高阶的还会应用上激光雷达,能更精确地对物体的距离、大小、状态做监测,极大地提升智能驾驶时的安全性。
但即便用上了多融合感知方案,其实还是会偶发事故,这说明了现有的这套感知系统仍然做不到尽善尽美,这就得引入更强大的感知系统。而最近在行业内备受瞩目的,就是埃安新推出的全新高端电子电气架构——星灵架构,在安全智驾这块,行业率先引入了航天级红外遥感技术。

这项技术强在哪?红外遥感技术具有超强透射率,普遍应用于航天、军事等领域;红外在智驾中的应用是可通过生命体热辐射成像,弥补“雷达+摄像头”感知系统对生命体识别不完整的盲区。再加上第二代激光雷达、摄像头、毫米波雷达等39颗传感器组成的多融合传感系统,以及星基融合定位技术等,埃安在智驾系统上可以说是全副武装了。
都别想着快速奔跑,“看”清路再说!
对于智能驾驶来说,要想完成自主行驶,就好像人走路一样,“看”得清路况是第一要求。就好像埃安那样的多融合感知系统,在算力冗余的前提下,装备的传感器越多、类型越丰富,“看”得也会更全面。
而特斯拉的纯视觉方案,在多个场景下的确会存在一些盲区,前面提到的一系列事件都是血淋淋的教训。但其实这些问题或多或少是可以减少发生概率的,最主要的原因是特斯拉在不完善的阶段,却大量宣传“自动驾驶”的高科技,这也是当下很多车企会出现的问题。
我们需要认知到的是自动驾驶离我们还非常遥远,这需要海量的行驶数据做支撑,而这些数据又必须从用户使用智能驾驶系统时获得。但现实情况是即便是非常基础的L2级辅助驾驶,很多人也是买车后从来没有启用过。屡见不鲜的智驾事故,让用户对这项技术产生了不信任感。
因此,要想真正推动智能驾驶发展,就必须要以安全作为前提。当下阶段车企亟需解决的是针对全场景全天候,从根本上解决智能驾驶的安全问题,让用户敢装敢用,并且乐意用、放心用。这才是当下智能驾驶技术需要发展并且突破的方向,也是最终实现自动驾驶的关键因素。总归一句话:在智能驾驶上,别想着撒丫子就跑,先把路“看”清了,保证安全最重要。
近日,西马克集团与鞍钢集团旗下的鞍钢广州汽车钢有限公司和鞍钢工程技术有限公司共同签订新建2号镀锌线的合同。
作为一家有着高度社会责任感的企业,佳通轮胎始终践行"绿色生产、精益制造"的可持续发展理念,不断探索绿色经营之道
奥动新能源携「轻卡30秒极速换电站」惊艳首发亮相,并全方位阐述「换储充一体」智慧能源服务理念与解决方案
全球出行科技公司亿咖通科技(纳斯达克股份代码:ECX)于2023年12月2日钛媒体集团2023 T-EDGE全球创新大会EDGE AWARDS颁奖盛典上,凭借强大的创新实力和领先出行智能化技术产品榜上有名。
今年以来,面对国际国内环境发生的深刻复杂变化,国家宏观政策靠前协同发力,扩内需、强信心、防风险,国民经济运行延续恢复向好态势,内生动力持续增强,高质量发展扎实推进。
3月25日,第六届中国汽车企业创新大会暨中国汽车企业创新“安亭指数”发布会在上海嘉定举行。
3月21日至22日,中共中央政治局常委、国务院总理李强在湖南调研并主持召开先进制造业发展座谈会。
3月份以来,汽车促销降价引起市场端的广泛关注和热议。
2023年3月16日,由中国汽车工业协会(以下简称“中汽协会”)组织的2023年一季度汽车行业重点企业经济运行交流会在京召开,本次会议得到了北汽集团的大力支持。
 微信公众号
微信公众号
 总编微博
总编微博

